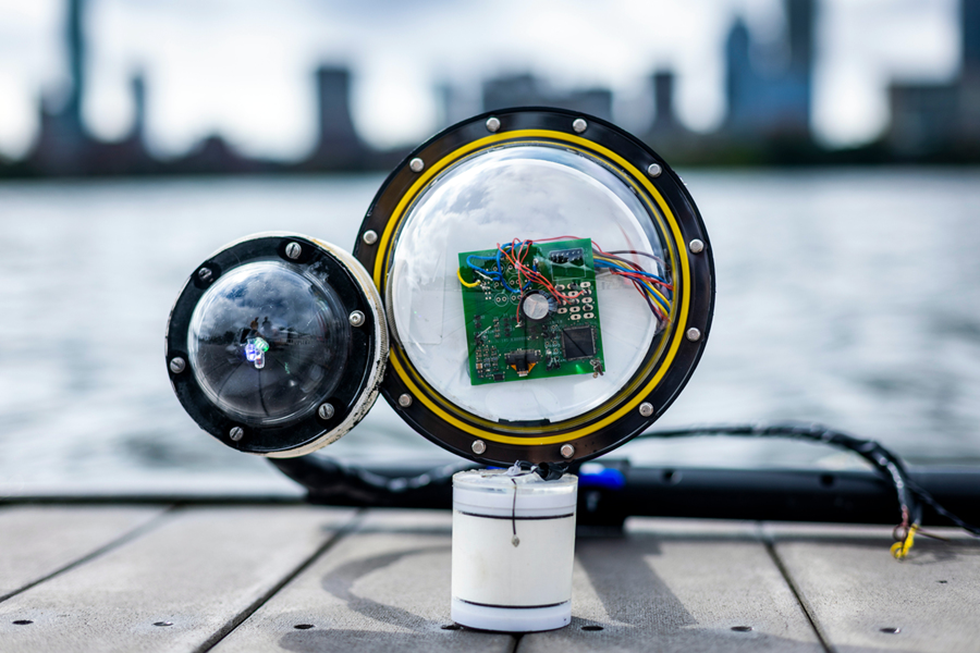
Engineers at MIT have developed a wireless underwater camera that does not require batteries
According to scientists, more than 95 percent of Earth's oceans have never been observed, meaning we know less about its oceans than we do about the surface of the moon or Mars.
A major obstacle to widespread underwater exploration is the high cost of powering an underwater camera for long periods of time, either by tethering it to a research vessel or sending a ship to replenish its batteries.
An underwater camera that is about 100,000 times more energy-efficient than other underwater cameras has been developed by researchers at MIT to address this issue. Wirelessly transmitting image data through the water, the device takes color photos, even in dark underwater environments.
In order to operate autonomously, the camera is powered by sound. The imaging and communication equipment is powered by mechanical energy generated by sound waves traveling through water. The camera transmits image data to a receiver using sound waves after capturing and encoding image data.
Since this camera does not require a power source, it can be operated for weeks on end before retrieval. Since the camera does not require a power source, scientists can search remote parts of the ocean for new species. In addition to capturing images of ocean pollution, it can also be used to monitor the health of fish raised in aquaculture systems.
The camera has numerous exciting applications, including monitoring the climate. When it comes to building climate models, we are missing data from over 95 percent of the ocean. By utilizing this technology, we may be able to develop more accurate climate models and better understand how climate change affects the underwater environment.
Afzal is co-lead author of the paper along with Sayed Saad Afzal, Waleed Akbar, and Osvy Rodriguez from the Signal Kinetics group, as well as Unsoo Ha, a research scientist, and Mario Doumet and Reza Ghaffarivardavagh, a former member of the group.
A battery-free system
It was essential for researchers to develop a device capable of harvesting energy underwater autonomously while consuming a minimal amount of energy in order to construct a camera that could function autonomously for long periods of time.
Throughout the exterior of the camera, piezoelectric transducers are used to obtain energy. In response to mechanical force, piezoelectric materials produce an electric signal. The transducers vibrate when a sound wave travels through water, and this vibration is converted into electrical energy by the transducers.
The sound waves could be generated by any number of sources, such as passing ships or marine life. In order to take photographs and transmit data, the camera stores harvested energy until it has accumulated enough power to operate the electronics.
As a means of reducing power consumption, the researchers used off-the-shelf, ultra-low-power imaging sensors. However, these sensors are only capable of capturing grayscale images. Due to the lack of light in most underwater environments, they also developed a low-power flash.
Adib says that the objective was to minimize the hardware as much as possible, which imposes new constraints on how the system is built, how information is sent, and how images are reconstructed.
It was possible to solve both problems simultaneously by using a combination of red, green, and blue LEDs. To capture an image, the camera shines a red LED and then uses image sensors to capture the image. It The same process is repeated with green and blue LEDs.
The red, green, and blue colors of light are reflected in the white portion of each photograph, despite the black and white appearance of the image, according to Akbar. When the image data are combined, it is possible to reconstruct the color image through post-processing.
Sound-based data transmission
Using a process known as underwater backscatter, image data is encoded as bits (1s and 0s) and transmitted to a receiver one bit at a time. Through the water, the receiver sends sound waves to the camera, which acts as a mirror to reflect them. Cameras either reflect waves back to receivers or convert their mirrors to absorbers so that they do not reflect back.
In order to determine if a signal has been reflected back from the camera, a hydrophone is located next to the transmitter. It is a bit-1 if it receives a signal; it is a bit-0 if it does not receive a signal. Using this binary information, the system reconstructs and post-processes the image.
Several underwater environments were tested by the researchers. In one of the images, they captured color images of plastic bottles floating in a pond in New Hampshire. As a result of these high-quality photographs, tiny tubercles along the arms of an African starfish were clearly visible. Aponogeton ulvaceus was also imaged repeatedly over the course of a week using the device in a dark environment to monitor its growth.
In order to make the device practical for deployment in real-world settings, the researchers plan to enhance the device now that they have demonstrated a working prototype. In order to capture real-time images, stream images, or even record underwater video, they intend to increase the memory of the camera.
In addition, they wish to extend the range of the camera. Data was successfully transmitted from the transmitter to the receiver at a distance of 40 meters, but it would be beneficial to extend that range to allow the camera to be used underwater. What a great potential for research in low-power IoT devices as well as underwater monitoring and research!
Comments ()