Pedestrian Trajectory Prediction: Forecasting Crossing Behavior & Intent
In the modern world, transportation systems are developing rapidly, and with them, the complexity of interaction between different traffic participants is increasing. Every year, road traffic incidents result in significant losses, making it crucial to develop effective approaches for analyzing and predicting pedestrian behavior. The ability of systems to predict the actions of traffic participants helps to reduce risks and increase the consistency of actions between people and vehicles.
In this context, methods are being actively researched that enable the tracking of traffic dynamics, identification of typical behavioral patterns, and response to unpredictable situations. The combination of modern data processing algorithms with sensor technologies creates the potential for developing more efficient and safer solutions in the field of transport infrastructure.
Why pedestrian behavior prediction matters in complex, unstructured traffic
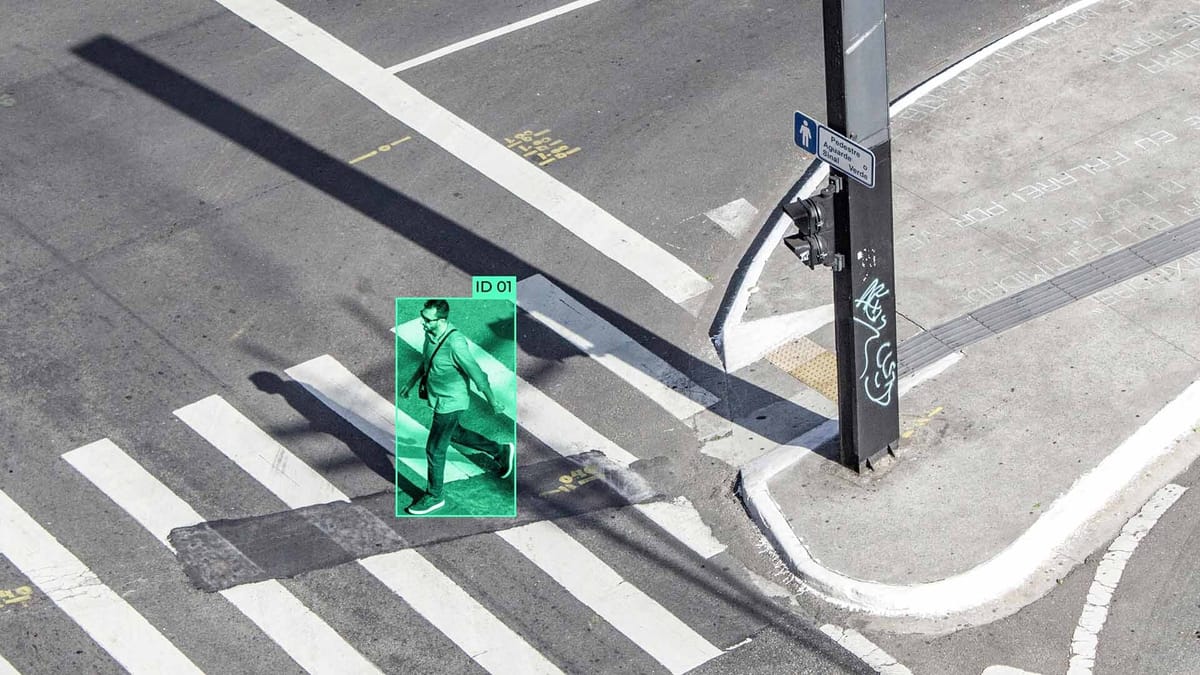
In complex and unpredictable road environments, pedestrian traffic is often chaotic, making it difficult to predict their actions. The high diversity of behavior and unpredictable maneuvers poses additional challenges for traffic management and risk assessment systems. Research focused on pedestrian crossing intent, action prediction, and behavior estimation enables the prediction of potentially hazardous situations and enhances the accuracy of risk assessment.
Accurate prediction of pedestrian intentions and actions is particularly important in urban environments with many conflict points and chaotic traffic flows. It ensures the timely response of transportation systems to unpredictable behavior of people, contributing to risk reduction and increased safety of road infrastructure.
State of the art in pedestrian behavior prediction: intention, trajectories, and interactions
Datasets and gaps: structured vs. unstructured environments and the IDD-PeD contribution
Generalization, transferability, and deployment in intelligent transportation systems
Current methods for predicting pedestrian behavior must demonstrate generalization across different road conditions to be effective in the real world. Models trained in structured environments often struggle to transfer to unstructured traffic, where pedestrians exhibit more unpredictable movement patterns.
The problem of transferability for systems integrated into intelligent transportation systems, where it is necessary to predict pedestrian crossing intent, perform action prediction, and conduct behavior estimation in conditions different from the training data, is that of robust knowledge transfer across cities, cultures, and road infrastructure types, increasing the accuracy of risk assessment and enabling systems to make safe and timely decisions.
Effective solutions must combine the prediction of pedestrian intentions and trajectories with risk assessment to improve the safety and efficiency of transportation infrastructure.
Summary
Successful deployment in transportation systems requires algorithms to adapt to different environments, take into account the social and behavioral interactions of pedestrians, and provide timely risk assessments. The combination of prediction of intentions, trajectories, and risk assessment is a key element for improving the safety and efficiency of modern road infrastructure.
FAQ
Why is pedestrian behavior prediction important in complex traffic environments?
Pedestrian behavior prediction is crucial in complex, unstructured traffic because pedestrians display diverse and unpredictable actions. Accurate prediction of pedestrian crossing intent and action improves risk assessment and reduces potential conflicts between vehicles and pedestrians.
What are the main focus areas in pedestrian behavior prediction research?
The main focus areas are predicting pedestrian crossing intent, modeling future trajectories, and understanding social and environmental interactions. Together, these enable more accurate behavior estimation.
How do structured and unstructured datasets differ in this field?
Structured datasets (like KITTI or ETH) represent organized urban traffic with predictable pedestrian behavior, while unstructured datasets (like IDD-PeD) capture dense, heterogeneous, and unpredictable scenarios. Unstructured datasets are essential for robust behavior estimation in real-world conditions.
What is the contribution of IDD-PeD to pedestrian behavior research?
IDD-PeD provides data on pedestrians in highly unstructured traffic, capturing diverse behaviors, interactions, and pedestrian crossing intent. It addresses gaps in risk assessment for complex urban environments.
Which models are commonly used for pedestrian trajectory prediction?
Common models include LSTM/RNN for sequential action prediction, graph-based or social force models for interactions, and Transformer-based models for estimating multi-agent behavior. These models enable accurate forecasting of pedestrian movements.
Why is generalization important for pedestrian behavior models?
Generalization ensures models trained on one dataset perform reliably in different traffic environments. This improves risk assessment and makes pedestrian crossing intent and action prediction applicable to real-world deployments.
What challenges arise when transferring pedestrian behavior models across environments?
Transferability is limited by differences in traffic density, pedestrian culture, and road structure. Models may fail to accurately estimate behavior or predict crossing intent in unfamiliar, unstructured environments.
How do multi-modal datasets enhance pedestrian behavior estimation?
Datasets that combine camera, LiDAR, and GPS data provide a richer context for action prediction and pedestrian crossing intent. Multi-modal information improves risk assessment by capturing both motion and environmental cues.
How do interaction-aware models improve pedestrian behavior prediction?
Interaction-aware models consider social and vehicle-pedestrian interactions to refine behavior estimation. They improve risk assessment by predicting how one pedestrian’s actions influence others in heavy or unstructured traffic.
What are the key considerations for deploying pedestrian behavior models in intelligent transportation systems?
Deployment requires robustness to diverse scenarios, real-time action prediction, and accurate risk assessment. Integrating pedestrian crossing intent and trajectory modeling ensures safer and more effective traffic management.


Comments ()